

 联系我们
联系我们

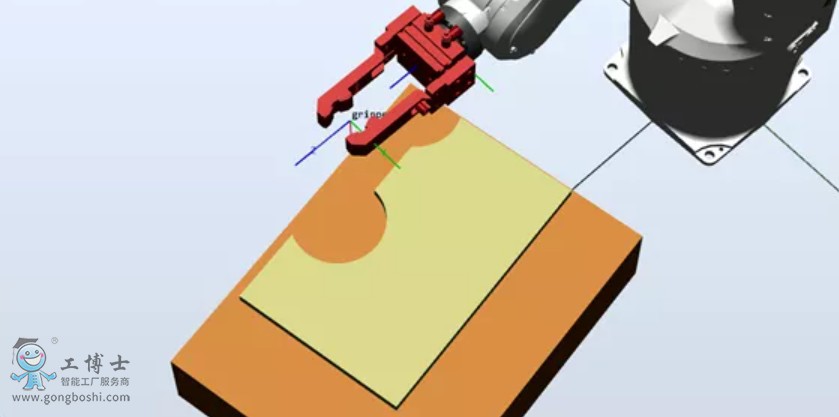
1. 机器人当前TCP如上图,此时TCP的Z方向沿着抓手方向,TCP的X方向大致与大地坐标系垂直。
2. 此时通过外设(激光测距等设备),告知机器人此时工件设备绕自身旋转了一定角度(例如10°)
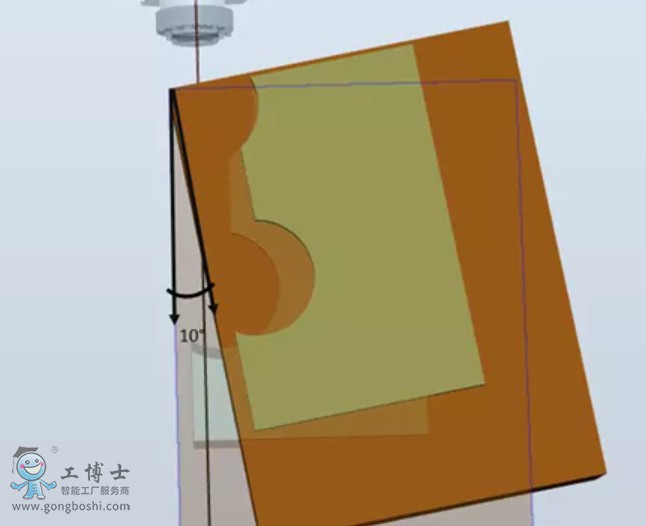
3. 此时希望机器人能调整自身姿态,使得抓手与旋转10°后的产品平行,并沿着产品方向前进100mm。
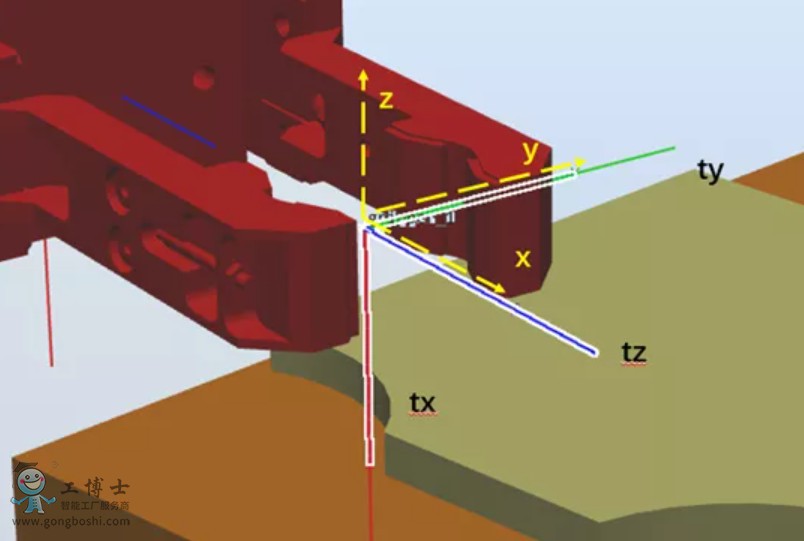
4. 由于现场并没有做工件坐标系,只有一个TCP,但产品原始姿态与机器人BASE平行。下图彩色坐标系为该点原始位姿,即可以让原始位姿(下图的tx,ty,tz)绕着与Base坐标系平行的一个坐标系(黄色坐标系)的z轴旋转10°,即在原始姿态上左乘旋转角度
5. 可以采用如下代码实现机器人的姿态的旋转和调整。

更多资讯:ABB机器人
