

 联系我们
联系我们

ABB机器人未命名点位轨迹倒序执行及批量设置名字
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除。
1. 现场ABB机器人程序,示教时没有给点位取名,直接使用星号,如下
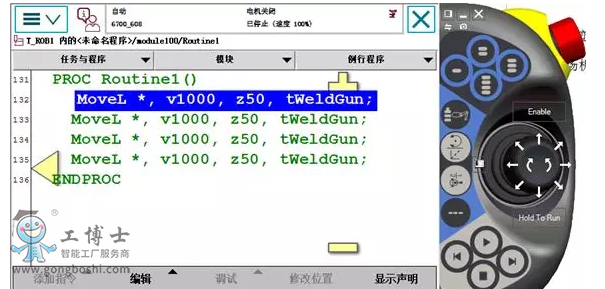
2. 现在希望轨迹能够调整顺序,即轨迹从后往前走,如何快速实现?
3. 可以借助ABB机器人robotstudio来实现
4. 在robotstudio创建系统并恢复现场轨迹
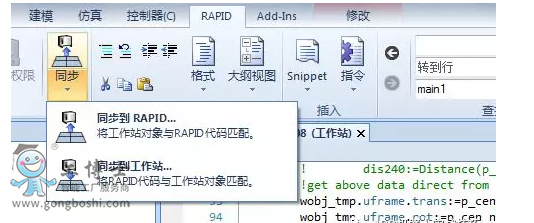
5. 点击上图中的同步到工作站,
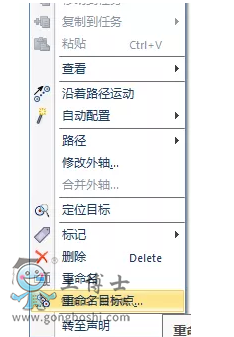
6. 在基本视图下,找到对应的例行程序,右击
7. 选择反转路径
8. 再选择同步到rapid,即可

9. 在步骤7时,也可以右击选择重名目标点,批量把未命名的点位命名
更多资讯:ABB机器人
- 下一篇:ABB机器人与厦门优质企业再次战略合作
- 上一篇:ABB喷涂机器人互联雾化器简介
