

 联系我们
联系我们

EGM提供3种特性
1.EGM Position Stream
RAPID任务中机械单元的当前和计划位置发送至外部系统。
速度能达到250Hz(4ms一个位置)。
2.EGM Position Guidance
可以实现机器人沿着某件外部装置所生成的路径移动(即可以变相实现外部路径直接规划)。
机器人可接收xyzabc笛卡尔坐标或a1-a6关节坐标。
能达到4ms。
3.EGM Path Correction
用某件外部装置提供的测量值来修改/校正所编写的机器人路径。
速度为48ms的倍数。
EGM Position Stream仅可用于Udp单播通信。其能够让机器人控制器定期发送机械单元(例如机器人、定位器、导轨..)的计划和实际位置数据。
通过Google Protobuf 定义文件 egm.proto来详细说明信息内容。用户可在IRC5控制器的高优先级网络环境(以此确保高达250赫兹的稳定数据交换)下运行周期通信通道(UDP)。
各运行任务必须配备一个通信通道。
EGM Position Stream可与EGM Position Guidance一同使用。
如何利用EGM Position Stream实现前文的炸裂效果
1.进入示教器-控制面板-配置-主题-communication-Transmission Protocal

2.进入新建一个项目,命名例如为UCdevice
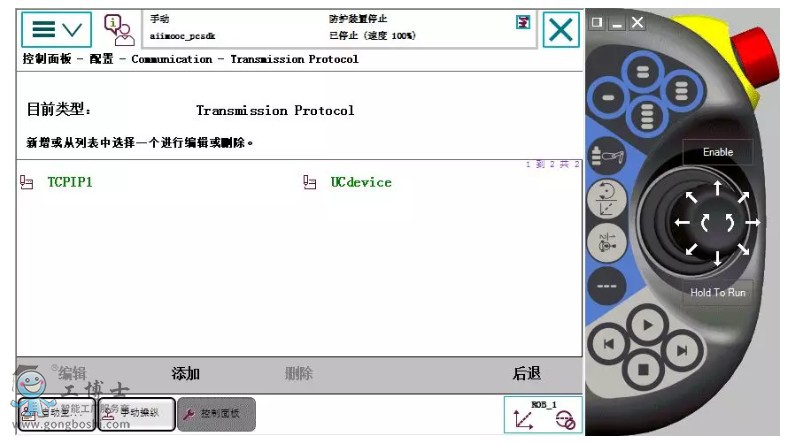
3.类型选择UDPUC,Remote Address为远程server的ip地址。使用EGM Stream时,通常机器人为client。

4.若有多个Server(设备)需要传送数据,设置端口如下。

5.在机器人创建代码如下:
PROC UDP_TEST1()
VAR egmident egmID1;
EGMGetId egmID1;
EGMSetupUC ROB_1,egmID1,"default","UCdevice"\Pose;
! 使用UCdevice设备,名字为前文配置设备名字,使用defaul配置。
! 如果发送数据格式为xyz q1-q4,选择类型为Pose
! 如果发送数据格式为a1-a6,选择类型为Joint
EGMStreamStart egmID1\SampleRate:=4
! 开始输出,采样率为4ms
MoveAbsJ jpos20,v100,z20,tool0;
MoveAbsJ jpos10\NoEOffs,v1000,fine,tool0;
! 移动机器人
EGMStreamStop egmID1;
! 停止输出
EGMReset egmID1;
ENDPROC
PROC UDP_TEST1()
VAR egmident egmID1;
EGMGetId egmID1;
EGMSetupUC ROB_1,egmID1,"default","UCdevice"\Pose;
! 使用UCdevice设备,名字为前文配置设备名字,使用defaul配置。
! 如果发送数据格式为xyz q1-q4,选择类型为Pose
! 如果发送数据格式为a1-a6,选择类型为Joint
EGMStreamStart egmID1\SampleRate:=4
! 开始输出,采样率为4ms
MoveAbsJ jpos20,v100,z20,tool0;
MoveAbsJ jpos10\NoEOffs,v1000,fine,tool0;
! 移动机器人
EGMStreamStop egmID1;
! 停止输出
EGMReset egmID1;
ENDPROC
6.EGM sensor protocol使用Google Protocol Buffers来进行编码,并把UDP则作为一则传送协议。选择Google Protocol Buffers的原因是其具有速度和语言中立性方面的优势。由于所发送的数据是高频发送的实时数据,且一旦丢失数据包,那么重新发送这些数据也无济于事,所以选择了UDP作为传送协议。
7.Google Protocol Buffers或Protobuf能非常高效地对数据进行串行化/去串行化。Protobuf大致上比 XML快10到100倍。互联网上有大量关于Protobuf的信息。
7.Google Protocol Buffers或Protobuf能非常高效地对数据进行串行化/去串行化。Protobuf大致上比 XML快10到100倍。互联网上有大量关于Protobuf的信息。
更多资讯:ABB机器人
